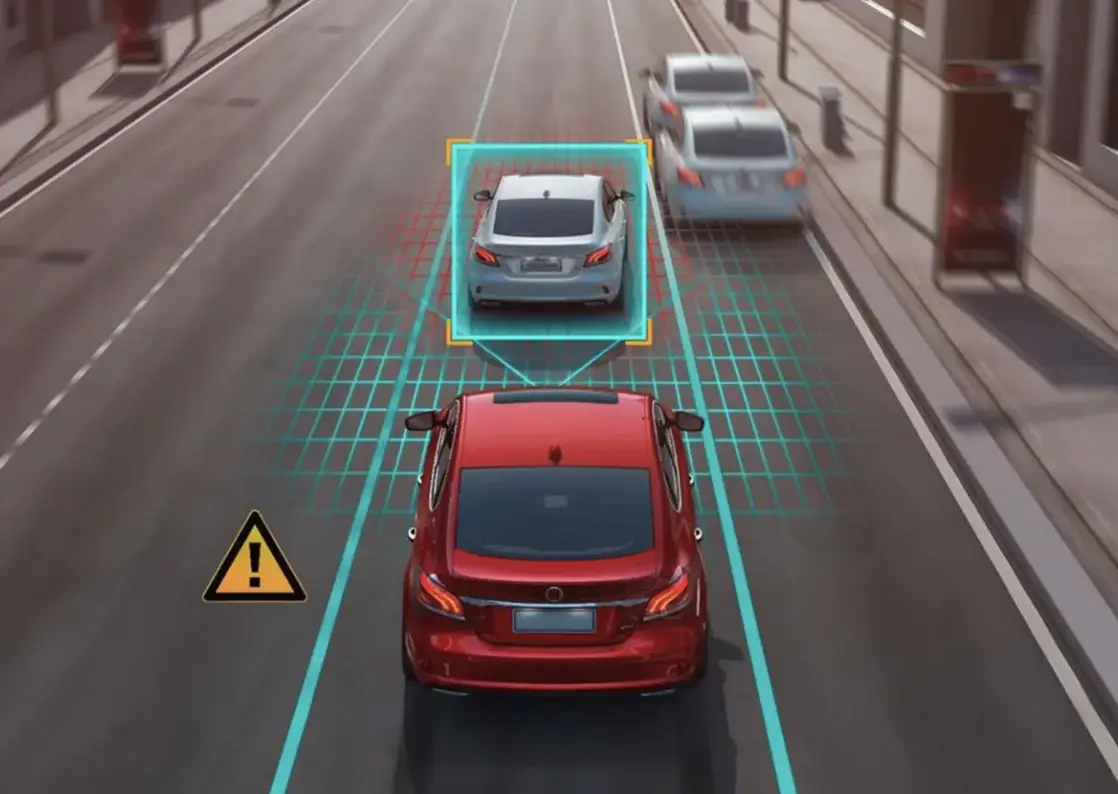
自动紧急制动系统(AEB)是一项提高驾驶安全的配置,主要由测距模块(传感器)、控制模块(中央处理器)和制动模块(执行单元)构成,能够在遇到危险情况时主动刹车或减速。AEB的作用是在驾驶员反应不及或没有注意到前方障碍物时,及时进行预警和制动,从而避免或减轻车辆追尾事故的发生。
AEB的效果已经得到了多项研究和评价的证实。根据欧洲新车评价规程(E-NCAP)和澳大利亚新车评价规程(ANCAP)于2015年共同发表的《配备AEB系统的车辆在现实中的有效性研究报告》,安装AEB的车辆,在车速小于50km/h时,可减少38%的追尾意外事故。另一项由美国高速公路安全保险协会(IIHS)和美国公路交通安全管理局(NHTSA)联合进行的研究也显示,AEB系统可以将前向碰撞事故的发生率降低50%,并将严重伤害事故的发生率降低56%。
由于AEB的重要性,全球多个国家和地区都将AEB纳入了新车安全评价的标准。欧洲新车评价规程(E-NCAP)于2014年开始将AEB纳入评分体系,并于2016年将AEB VRU(行人和骑行者检测)纳入评分体系。美国高速公路安全保险协会(IIHS)于2016年开始将碰撞预防系统纳入到“TOP SAFETY PICK”或“TOP SAFETY PICK+”的考核范围。中国新车评价规程(C-NCAP)于2018年开始进行AEB系统试验评价。此外,美国、欧盟、日本等20个国家和地区的汽车制造商也于2016年签署了一项协议,承诺到2022年,所有新销售的车辆都将配备AEB系统。

然而,尽管AEB系统对于提升驾驶安全有着显著的作用,但它并不是万能的,也不是完美的。AEB系统仍然面临着一些技术难点和发展方向,需要不断地进行研究和改进。本文将从以下几个方面,对AEB系统的现状和趋势进行分析和探讨:
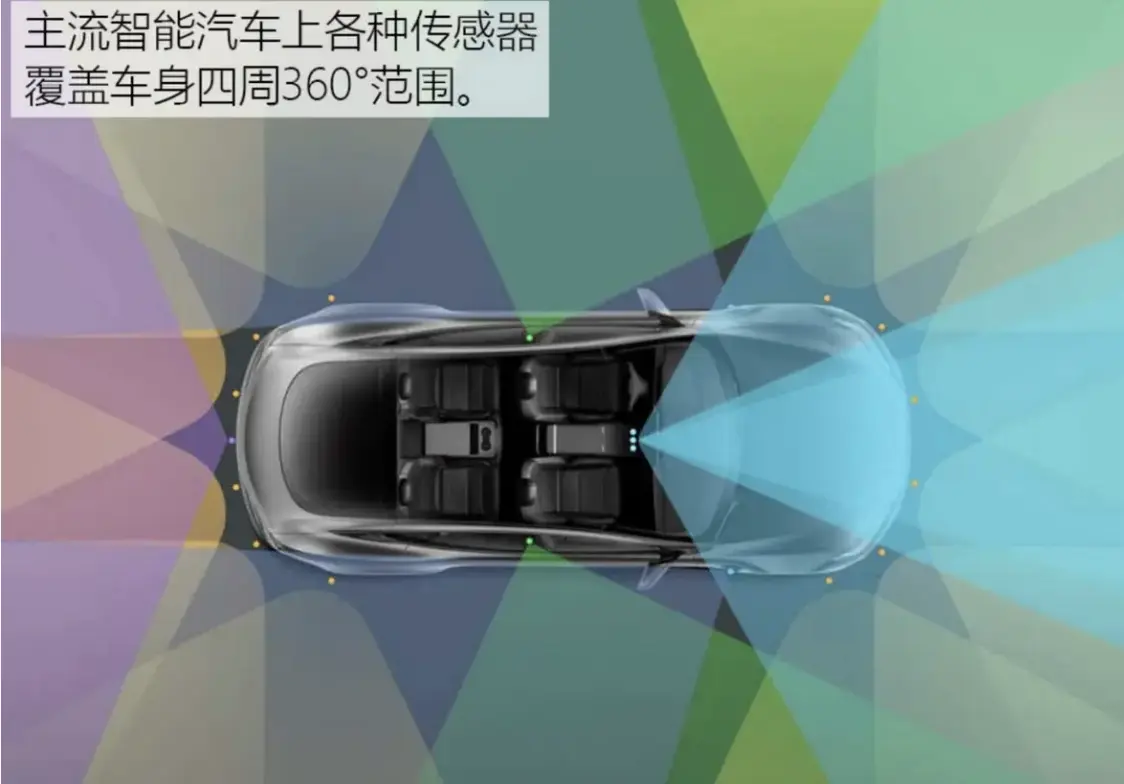
AEB系统的感知能力是指AEB系统能够通过传感器对车辆周围的环境进行探测和识别,包括障碍物的类型、位置、速度、运动轨迹等信息。AEB系统的感知能力直接影响了AEB系统的判断能力和执行能力,因为只有准确地感知到前方的危险情况,才能及时地做出正确的决策和制动动作。

目前,AEB系统主要使用的传感器有以下几种:
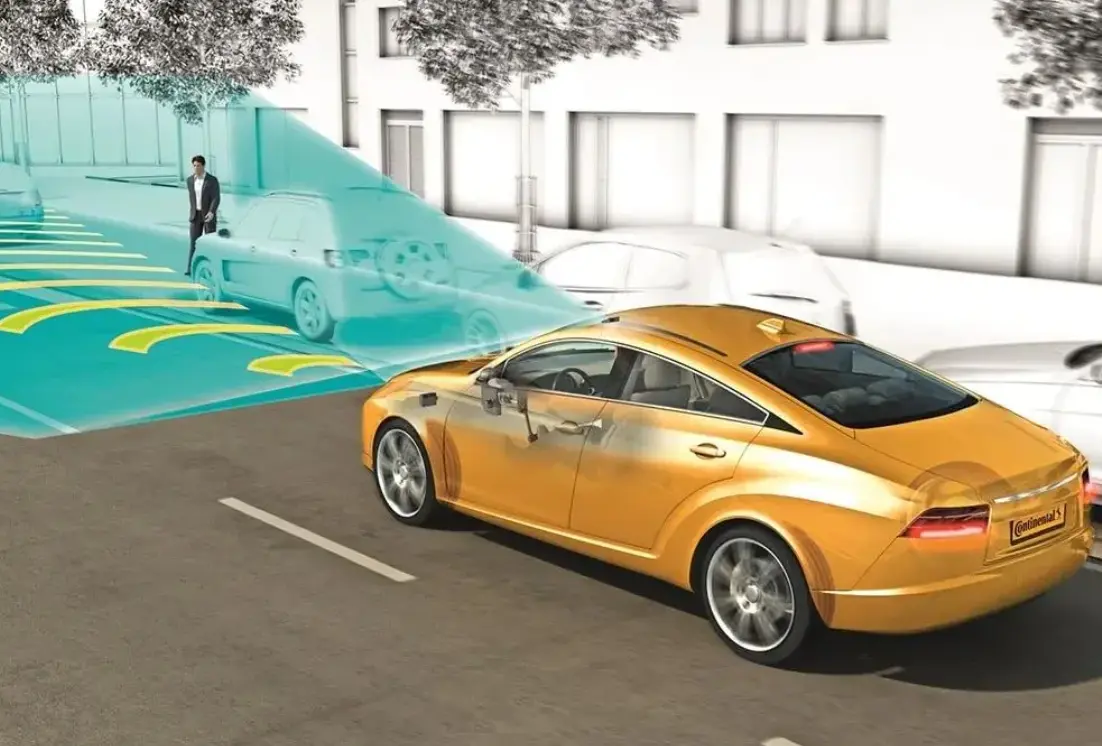
摄像头:摄像头是一种基于视觉的传感器,能够捕捉车辆周围的图像信息,并通过图像处理和机器学习的方法进行目标检测和识别。摄像头的优点是成本低、分辨率高、能够识别颜色和形状等特征,适合用于行人和骑行者的检测。摄像头的缺点是受光照、天气、遮挡等因素的影响较大,容易出现误检或漏检的情况,而且对距离和速度的测量不够精确,需要与其他传感器进行融合。
雷达:雷达是一种基于电磁波的传感器,能够发射和接收电磁波信号,并根据信号的反射和相位差来测量目标的距离和速度。雷达的优点是抗干扰能力强、测量精度高、工作范围广,适合用于车辆和固定障碍物的检测。雷达的缺点是成本高、分辨率低、不能识别颜色和形状等特征,需要与其他传感器进行融合。

激光雷达:激光雷达是一种基于激光的传感器,能够发射和接收激光束,并根据激光束的反射和飞行时间来测量目标的距离和速度。激光雷达的优点是分辨率高、测量精度高、能够获取三维信息,适合用于复杂和动态的场景。激光雷达的缺点是成本高、体积大、功耗大、易受雨雾等因素的影响,需要与其他传感器进行融合。
目前,AEB系统的传感器配置主要有以下几种:
单摄像头:单摄像头是最简单也最便宜的配置,一般安装在挡风玻璃上,能够提供基本的AEB功能,但是对行人和骑行者的检测能力较弱,且受光照和天气的影响较大,容易出现误刹或失效的情况。
双摄像头:双摄像头是在单摄像头的基础上增加了一个摄像头,一般安装在车头两侧,能够提高AEB的视野和精度,同时也能够提供一定的立体视觉效果,对行人和骑行者的检测能力有所提升,但是仍然受光照和天气的影响较大,且成本和复杂度也有所增加。
摄像头+雷达(续):摄像头+雷达是一种常见的传感器融合配置,一般将摄像头安装在挡风玻璃上,将雷达安装在车头中央,能够兼顾AEB的性能和成本,同时也能够利用雷达的抗干扰能力和测距能力来弥补摄像头的不足,对行人和骑行者的检测能力较强,且受光照和天气的影响较小,但是对于一些小型或低反射的障碍物,如铁丝网、塑料袋、玻璃瓶等,雷达可能无法有效地检测到,而摄像头也可能因为分辨率或角度的限制而无法识别出,这就需要更高级的算法来进行处理和判断。
摄像头+雷达+激光雷达:摄像头+雷达+激光雷达是一种高端的传感器融合配置,一般将摄像头安装在挡风玻璃上,将雷达安装在车头中央,将激光雷达安装在车顶或车头,能够提供最优的AEB功能,同时也能够利用激光雷达的高分辨率和三维信息来补充雷达和摄像头的不足,对各种类型和大小的障碍物都有很强的检测能力,且受光照和天气的影响较小,但是成本和复杂度也是最高的,而且激光雷达的体积和功耗也是一个问题,需要进行优化和降低。

目前,市场上的AEB系统大多采用摄像头+雷达的配置,如华为的MDC(移动数据中心)平台,小鹏汽车的XPILOT 3.0,理想汽车的Lidar Pilot等,都是基于摄像头+毫米波雷达的方案,能够实现高速和低速的AEB功能,以及行人和骑行者的AEB功能。其中,理想汽车还首次将激光雷达应用于量产车型,通过激光雷达+毫米波雷达+摄像头的三重融合,提升了AEB的感知能力和精度,能够在更复杂的场景下进行更有效的制动,如在雨雾天气、夜间、隧道等情况下,对于铁丝网、塑料袋、玻璃瓶等障碍物,也能够进行准确的识别和避让。
AEB系统的感知能力是AEB系统的基础和核心,也是AEB系统的发展方向之一。随着传感器技术的进步和成本的降低,AEB系统的感知能力将会不断提高,能够适应更多的场景和需求,为驾驶安全提供更强的保障。



 视频直播
视频直播





